Simulação Musculoesquelética e Controlo Neuromuscular:
OpenSim
Por: Alice Paulo
O movimento é inerente e essencial à vida humana e animal, emergindo da interação de complexos sistemas neurais, musculares e esqueléticos. Um software que permite determinar variáveis laboriosas de medir a nível experimental, como a força gerada pelo músculo, estiramento e dotado da capacidade de prever novos movimentos, a partir de modelos de controlo motor, é um forte aliado ao estudo da dinâmica músculoesquelética.
Estes foram os alicerces fundamentais ao desenvolvimento da OpenSim (Figura 1), um pacote de software cujas simulações e aplicações têm apresentado um papel primordial no controle neuromuscular pós cirurgia e desenvolvimento de dispositivos mecânicos implantáveis.
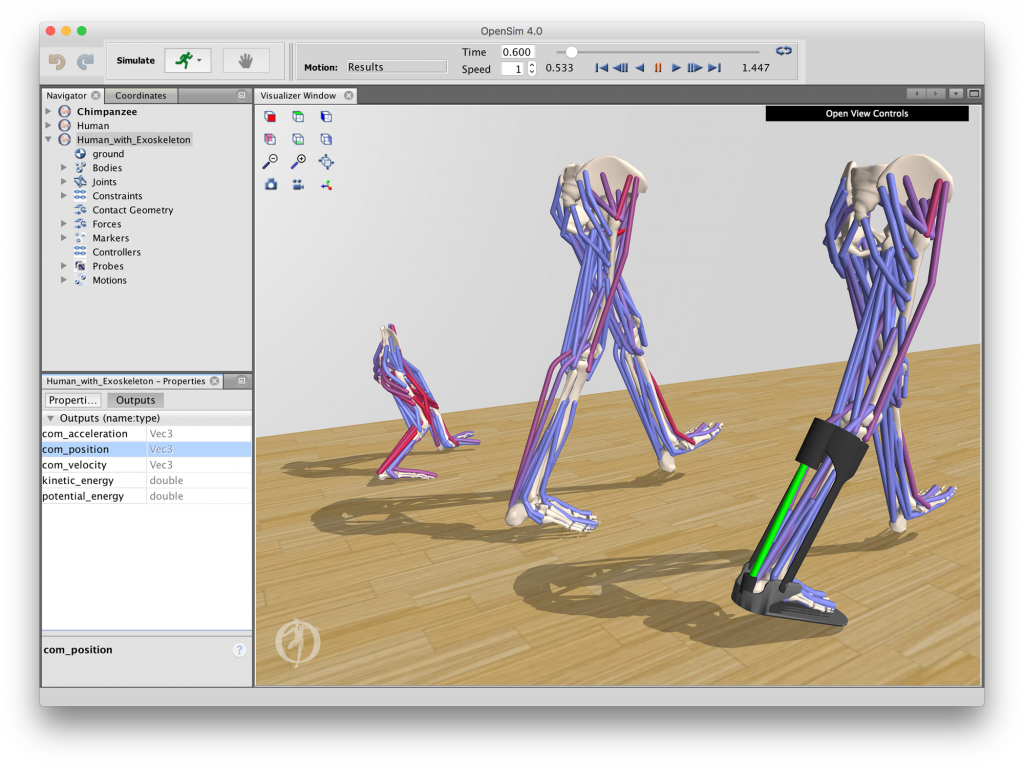
Figura 1 - Interface gráfica do software OpenSim
Com a sua interface simples e interativa revelou-se uma ferramenta bastante útil para projetos de investigação e académicos, já que é compatível com linguagens de programação comuns como C++, Java, MATLAB e Python. O facto de incluir modelos computacionais de músculos, articulações e outras estruturas músculoesqueléticas validados com base em dados experimentais obtidos através de animais e posteriormente adaptados para o estudo do movimento humano (Fig. 2) é uma valência que possibilita ao utilizador um conjunto de ações. Entre estas destacam-se:
- Construção e manipulação de modelos biomecânicos;
- Simulação da dinâmica músculoesquelética e do controle neuromuscular;
- Previsão de novos movimentos e adaptação a novas condições externas, sem a necessidade de realização de um protocolo experimental;
- Criação e partilha de novos modelos computacionais, métodos numéricos e ferramentas de simulação que amplificam as capacidades do software e ainda a criação de estudos personalizados que combinam ferramentas computacionais pré-existentes.
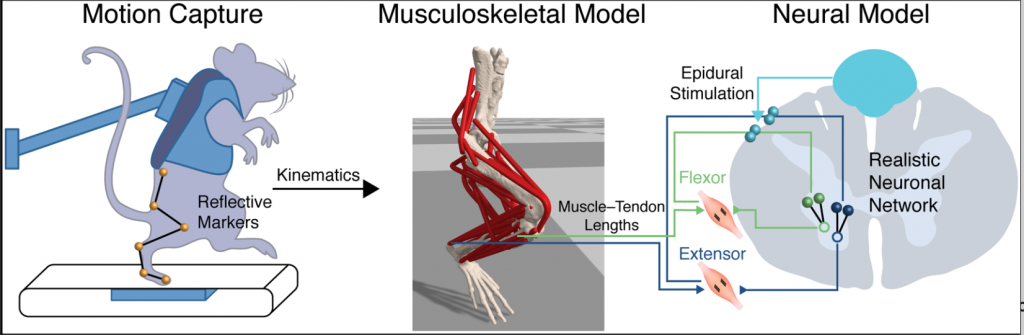
Figura 2 - Combinação de modelos neurais e músculo-esqueléticos para o estudo e neuromodulação de circuitos espinhais para a correção de défices motores.
Desde o seu desenvolvimento, o OpenSim é utilizado em largas simulações e trabalhos experimentais, especialmente na área da robótica e neuroreabilitação. Os últimos estudos e desenvolvimentos têm sido centrados em trabalhos como a descoberta de relações forma/função explicativas do movimento humano e animal; design de dispositivos de exoesqueletos implantáveis; investigação do papel dos mecanismos de reflexos na criação do movimento e prevenção de lesões, assim como a incorporação de modelos músculoesqueléticos em estudos de simulação multidisciplinares que exigem conhecimentos e ferramentas de diversas áreas (neurociência, oftalmologia e interação homem-máquina).
A complexidade e diversidade do sistema motor humano (e animal) apresenta complexos desafios per si, que apenas conseguem ser superados pela união do conhecimento de equipas multidisciplinares englobando investigadores, engenheiros e clínicos. Toda esta comunidade beneficia de modelos computacionais de simulação, como a OpenSim, para testes de hipóteses, estabelecer relações e novas descobertas que em muito acrescenta ao conhecimento científico.
FONTE:
PLOS Computational Biology | OpenSim Moco: Musculoskeletal optimal control