Luva de reabilitação pós AVC baseada numa interface cérebro-computador
Por: Diana Aires
Uma interface cérebro-computador implica que não há teclado, não há ecrã tátil, existe apenas pensamento. Este tipo de interface combina as descobertas mais recentes da neurociência com computação numa tentativa de estabelecer uma relação direta entre o cérebro e um dispositivo.
Neste âmbito, uma equipa de investigadores da Universidade Nacional de Singapura e da Agência para a Ciência, Tecnologia e Pesquisa (ASTAR) recorreu a uma interface deste género para desenvolver um dispositivo revolucionário, dispositivo este que se destina a ser utilizado como um meio de terapia para pacientes que sofreram um ataque vascular cerebral (AVC).
O AVC resulta da lesão ou morte de células celulares devido a um défice no fornecimento de oxigénio e nutrientes causado por um bloqueio do vaso sanguíneo ou por uma rutura do mesmo. Em muitos países, o AVC é a causa principal de desabilitação, sendo uma consequência comum a perda da capacidade de movimentar os membros superiores. Isto tem um impacto bastante grande na vida dos pacientes, uma vez que os impossibilita de realizar as mais diversas tarefas do seu dia a dia.
Atualmente, já existem técnicas de reabilitação bastante variadas, tais como terapia de movimento induzido por restrição, terapia do espelho e terapia auxiliada por robô com recurso a um sistema efetor final. No entanto, muitas destas técnicas estão dependentes de um nível mínimo de movimento residual, o que exclui uma grande parte dos pacientes. Com isto em mente, esta equipa de investigadores desenvolveu uma técnica de terapia puramente dependente do pensamento. Técnica esta que consiste numa luva robótica móvel comandada por uma interface cérebro-computador.
Durante o ensaio mental de tarefas de movimento físico, sinais relacionados com a sincronização e a dessincronização relacionadas a eventos podem ser detetados em eletroencefalogramas (EEGs). Estes sinais podem, posteriormente, ser utilizados como input numa interface cérebro-computador que, por sua vez, analisa e traduz esses sinais em comandos de output para um dispositivo, neste caso a luva robótica.
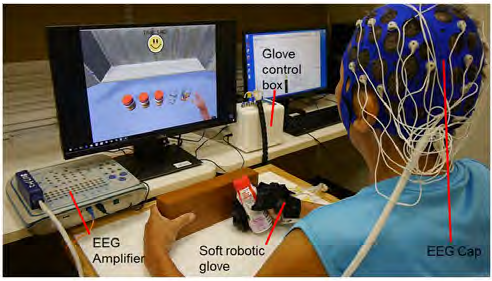
Figura 1 - Representação do conjunto composto pelo sistema de aquisição de EEG que proporciona o sinal que é processado pela interface cérebro-computador e que desencadeia duas respostas, uma direcionada à luva robótica e outra correspondente ao feedback visual exibido no ecrã.
A interface cérebro-computador pode ainda ser programada para desencadear um feedback contingente para o paciente. Neste caso, é desencadeada uma resposta visual através de uma representação da tarefa num ecrã. O acoplamento do atuador robótico (a luva) com um sistema de feedback visual (avatar de realidade virtual) estabelece uma relação entre a atividade cortical (intenção motora) e o movimento, o que permite restaurar as conexões corticospinais e corticomusculares.
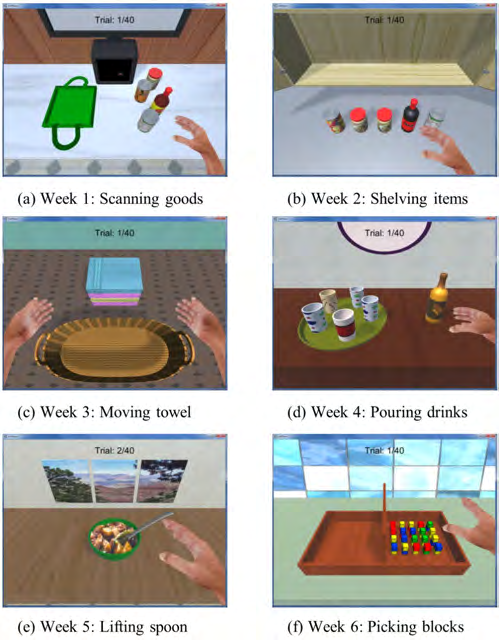
Figura 2 - Exemplificação das diversas tarefas que podem ser simuladas e utilizadas como estímulo de feedback.
Deve-se ainda notar que o atuador robótico se trata de uma luva móvel. Na maioria dos casos em que são utilizados atuadores robóticos, as articulações são constituídas por materiais rígidos o que limita o movimento e causa desconforto no paciente. Para evitar tais complicações, esta equipa de investigadores recorreu a materiais flexíveis que permitem uma melhor conformação ao membro humano e aos movimentos que este realiza.
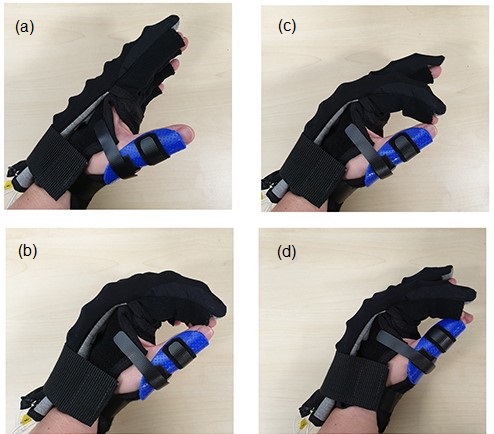
Figura 3 - Exemplificação da ativação dos atuadores: (a) extensão total; (b) preensão em flexão total; (c) preensão com recurso ao polegar e ao indicador; (d) preensão com recurso a três dedos.
Este avanço tecnológico revela um enorme leque de oportunidades para aqueles que sofreram algum tipo de incapacitação. Este aparelho é direcionado à mão, mas muitos mais poderão surgir deste conceito e, deste modo, os pacientes que sofreram uma perda total da sua capacidade motora e que, por essa razão, não estariam aptos para adotar as técnicas convencionais de terapia, poderão agora ter esperança de a recuperar.
FONTES: